


Eine der vielen Lebensweisheiten lautet „Man soll den Tag nicht vor dem Abend loben“. Unser Rezensent Günter Brinkhoff wollte sich ausnahmsweise(!) einmal nicht daran halten. Er gelangt schon in der Vorbemerkung zum Review, über die von Aerosoft herausgegebene Twin Otter DHC-6 300, zu einem äußerst positiven Urteil und einer beinahe unheilbaren Begeisterung. Zu diesem Zeitpunkt, als er die Vorbemerkung zum Review schrieb, hatte er das Add On aber noch gar nicht ausgiebig getestet. Er versprach niemals wieder gegen diese Lebensweisheit zu verstoßen, falls er, nach den ausführlichen Tests, seine vorschnelle positive Beurteilung bereuen müsse. Ob er dieses Versprechen geben muss erfahrt Ihr nun unter
Eine Vorbemerkung
Es ist sicherlich nicht unhöflich dem Projektmanager von Aerosoft Matthias Kok eine besondere Neigung zur DHC-6 300 Twin Otter zu unterstellen. Diese erschien kürzlich, erneut unter seiner Leitung, als sogenannte AS DHC-6 300 Extended Version für den FSX. Jahre zuvor war die Twin Otter bereits von Lago (2002) und von Aerosoft (2008), damals in Kooperation mit Sibwings, auch schon unter seiner Leitung für den MS Flugsimulator herausgebracht worden. Die AS DHC-6 300 Extended Version hat nun eine Simulationstiefe erreicht, insbesondere durch das eingebaute Motorenmanage- mentsystem, die dem Simmer, wenn er sich denn darauf einlassen will, viel Verständnisarbeit aber auch lehrreiche Unterhaltung beschert. Wer will und ausreichend Zeit hat, einschließlich eines intakten Nervenkostüms, kann sich mit diesem Add On in die komplexe Simulation der Turboproptechnik einarbeiten, die anspruchsvoll genug ist und einen Vergleich mit der Turboprop Dash 8 Q 400, von Majestic Software, nicht scheuen muss. Schließlich sind in beiden Modellen Turbinentriebwerke von Pratt & Whitney Canada verbaut, die sich durch besondere Verfahren beim Startvorgang der Motoren bzw. Propeller auszeichnen und die für eine ganze Reihe von Turboprops charakteristisch sind. Doch dazu später mehr.
Diesen Flugzeugtyp bin ich in der Realität nie geflogen. Zudem lag mir ein originales Betriebshandbuch (Operating Manual) zur DHC-6 Twin Otter nicht vor, um die besonderen Systemeigenschaften der simulierten Twin Otter mit dem realen Flugmodell zu vergleichen. So ist es mir nur möglich, das Add On anhand der von den Entwicklern zur Verfügung gestellten Systemunterlagen und Leistungsdaten zu beurteilen. Zudem kann ich zur spezifischen Flugcharakteristik der Twin Otter nur Plausibilitätsüberlegungen anstellen. Diese müssen naturgemäß als vorläufig betrachtet werden, solange mir keine weiteren Informationen zugänglich sind. Die simulierte Funktionsweise der Systeme und das Flugverhalten im Allgemeinen lassen sich dagegen schon beurteilen und so einer Kritik unterziehen.

Die DHC-6 Twin Otter – ein Klassiker unter den Turboprops
Ich möchte den historischen Werdegang des Flugzeugs, einschließlich aller Modellvarianten, hier nicht schildern. Dazu findet man bei Wikipedia hier umfangreiche Informationen. Auch in den Manuals zum Add On können entsprechende Informationen nachgeschlagen werden. Erwähnt sei hier nur, dass die DHC-6 Twin Otter mittlerweile nicht mehr von de Havilland gebaut wird, sondern von der Firma Viking Air. Diese erwarb 2006 die Patente und die Produktionsrechte zum Bau der DHC-6 Twin Otter von Bombardier Aerospace. Die Firma de Havilland wurde 1986 an Boeing verkauft und kam 1992 in den Besitz der Bombardier Aerospace. Von der DHC-6 Twin Otter wurden bis 1988 insgesamt 844 Maschinen gebaut, wobei die DHC-6 300 die am häufigsten gebaute Version war. Seit 2008 baut Viking Air die DHC-6 400 Twin Otter, die mit modernen Honeywell‘s Classcockpit Technologie, leistungsstärkeren Triebwerken und neuartigen Verbundwerkstoffen ausgestattet ist.
Charakteristisch für die DHC-6 Twin Otter waren und sind die hervorragenden STOL Eigenschaften (Short Take Off and Landing) der Maschine. Die DHC-6 Twin Otter startet und landet auf Pisten, die nicht länger als 366 m sein müssen. Damit benötigt sie nicht mehr an Landestrecke, als eine Cessna 172, obwohl sie gegenüber dieser ein weitaus höheres Landegewicht aufweist. Wegen ihrer guten STOL Eigenschaften ist die Maschine weltweit und vielseitig einsetzbar, insbesondere da, wo nur kleine oder unbefestigte Pisten existieren. Einen interessanten Film findet der luftfahrtinteressierte Simmer übrigens auf der Webseite von Viking Air, der die historische Entwicklung von Flugzeugen mit STOL Eigenschaften zeigt. Auf diesem Gebiet hat sich die Firma de Havilland einst einen unvergesslichen Namen gemacht.
Bei der DHC-6 300 Twin Otter muss man übrigens kein schlechtes Gewissen haben, wenn man sie, als Pilot real oder im Simulator, alleine fliegt. Dies gilt zu mindesten für jene Simmer unter uns, die es so real wie möglich haben wollen und die vor allem „gesetzestreu“ fliegen wollen. Denn diese Maschine hat, ganz im Gegensatz zu einer Boeing 737, von den Luftfahrtbehörden die Zertifizierung erhalten, dass sie von nur einem Piloten geflogen werden darf. Diese Erlaubnis gilt allerdings nur unter bestimmten Bedingungen.
Der Download – was geliefert wird
Aerosoft liefert die Twin Otter DHC-6 300 (Version 1.04) zurzeit nur in der Standardausführung (normales Radfahrwerk) und Schwimmerfahrwerk aus. Die leistungsschwächere Twin Otter DHC-6 100 und die Spezialversionen mit Ski- und Tundrafahrwerk werden erst später ausgeliefert. Je nach Einsatzzweck wird die Twin Otter mit 4-blättrigen oder 3-blättrigen Propellern ausgeliefert. Zum Add On gehört ein Beladungs- und Treibstoffplaner, sowie Dokumente zur Erläuterung der Installation, der Systemlogik und einen Nachweis über die primären grundlegenden Leistungsdaten der Twin Otter. Zudem wird ein Flugdatenschreiber ausgeliefert, der sogenannte Digital Flight Data Recorder (bzw. DFDR Modul). Mit dem Flugdatenschreiber, der direkt im Masterpanel der Twin Otter integriert ist (!), können eine Vielzahl an Flugparametern aufgezeichnet werden, so unter anderem die Routenführung im Endanflug. Die Routenführung kann im Nachhinein in Google Earth dargestellt werden. Dies gelingt aber nur mit dem Flight Recorder Manager, der ebenfalls mit dem Add On ausgeliefert wird. Auch für Repainter stellt das Add On die entsprechenden Basisdateien zur Verfügung. Der Simmer bekommt also einiges an sinnvollen Features geboten, die das Add On zusätzlich aufwerten.
Der Außencheck – eine Augenweide
Bevor wir losfliegen schauen wir uns kurz die Maschine von außen und innen an. Beim Außencheck bekommen wir eine hochdetaillierte Maschine zu sehen. Eine Vielzahl von Türen und Ladeluken werden animiert dargestellt. Selbst die Propeller werden in Segelflugstellung ( Feathering) gebracht, wenn die Propellerturbine ausfällt oder nach der Abstellung ausgeschaltet wird. Jedes Detail wird annähernd realistisch dargestellt. Ob nun Lufteinlässe, Abscheider, Entlader, Pitotrohr, Antennen, Tailbumper, Notausstiege oder Gummiwülste, die zum pneumatischen Absprengen des Eisansatzes an den Tragflächen benötigt werden, all diese äußeren Anbauten sind vorhanden. Ja, ich vermute sogar, dass wirklich jede Niete, die zum Verbinden der Metallbauelemente für Zelle und Flügel eingeschlagen wurde, auch hier in der Simulation korrekt modelliert wurde. Die Texturen sind dennoch kontrastreich und wirklichkeitsgetreu aufgelöst. Hier sollte sich jeder Simmer Zeit nehmen, die Außendetails zu inspizieren und ehrfürchtig zur Kenntnis nehmen, wie viel Arbeit die Entwickler hier reingesteckt haben.
Feathering) gebracht, wenn die Propellerturbine ausfällt oder nach der Abstellung ausgeschaltet wird. Jedes Detail wird annähernd realistisch dargestellt. Ob nun Lufteinlässe, Abscheider, Entlader, Pitotrohr, Antennen, Tailbumper, Notausstiege oder Gummiwülste, die zum pneumatischen Absprengen des Eisansatzes an den Tragflächen benötigt werden, all diese äußeren Anbauten sind vorhanden. Ja, ich vermute sogar, dass wirklich jede Niete, die zum Verbinden der Metallbauelemente für Zelle und Flügel eingeschlagen wurde, auch hier in der Simulation korrekt modelliert wurde. Die Texturen sind dennoch kontrastreich und wirklichkeitsgetreu aufgelöst. Hier sollte sich jeder Simmer Zeit nehmen, die Außendetails zu inspizieren und ehrfürchtig zur Kenntnis nehmen, wie viel Arbeit die Entwickler hier reingesteckt haben.
Der Innencheck – noch eine Augenweide
Doch so richtig los geht es mit dem Augenschmaus, wenn man das Cockpit der Maschine besteigt. Hier bietet sich in 3D-Ansicht ein Bild, das ich bisher so noch nicht gesehen habe. Abnutzungsspuren an den Kreiselinstrumenten, Erosionserscheinungen und Fettflecken auf den Instrumentenbrettern vermitteln einen Eindruck vom harten Arbeitsalltag dieser Maschine. Keineswegs hinterlässt das Cockpit dabei aber einen ungepflegten oder unordentlichen Eindruck. Klassisch das Uhrencockpit. Vor dem Piloten, auf dem Hauptinstrumentenbrett, die „heiligen sechs“ Flugüberwachungsinstrumente, die zur Überwachung der Fluglage der Maschine benötigt werden. Etwas störend wirkt sich hier die Steuersäule aus. Die Instrumente ADF Finder, der Radio Magnetic Indicator (RMI) und das Variometer werden durch diese teilweise verdeckt, was den CheckUp der Instrumente etwas beeinträchtigt. Hier hilft nur die Steuersäule etwas nach hinten zu ziehen, um einen vollständigen Blick auf die Instrumente zu erhalten. In der Mitte die Triebwerküberwachungsinstrumente und die Schalter für die Kraftstoffpumpen. Dann die Instrumente der Avionikanlage und ein darüber eingebautes Garmin GN530 GPS Gerät, das erweiterte Funktionen zur Verfügung stellt, als das Standard GPS Gerät im FSX. Flugpläne, die zum Beispiel mit dem FlightSim Command er erstellt werden, lassen sich mit dem GPS Gerät halbwegs realistisch abfliegen. Darüber das Anzeigebrett zur Darstellung der Signal- bzw. Warnleuchten, für die diversen Betriebszustände der Instrumente und Systeme. Alle Instrumente und Signalleuchten wirken sehr plastisch und ihre Anzeigen sind gut ablesbar. Auch in der Nachtbeleuchtung ist das Cockpit eine Wucht. Die Ziffern und Anzeigeskalen der Instrumente leuchten hell und kristallklar. Das Instrumentenbrett und die Kabine werden, durch Klicken auf die entsprechenden Schalter, in ein gedämpftes und angenehmes Licht getaucht. Doch trotz dieser angenehmen Beleuchtung kommt keine schläfrige Stimmung auf. Dafür gibt es einfach viel zu viel zu sehen, einzustellen und zu kontrollieren. Dass wirklich Tolle aber ist, dass fast all diese Hebel, Schalte
er erstellt werden, lassen sich mit dem GPS Gerät halbwegs realistisch abfliegen. Darüber das Anzeigebrett zur Darstellung der Signal- bzw. Warnleuchten, für die diversen Betriebszustände der Instrumente und Systeme. Alle Instrumente und Signalleuchten wirken sehr plastisch und ihre Anzeigen sind gut ablesbar. Auch in der Nachtbeleuchtung ist das Cockpit eine Wucht. Die Ziffern und Anzeigeskalen der Instrumente leuchten hell und kristallklar. Das Instrumentenbrett und die Kabine werden, durch Klicken auf die entsprechenden Schalter, in ein gedämpftes und angenehmes Licht getaucht. Doch trotz dieser angenehmen Beleuchtung kommt keine schläfrige Stimmung auf. Dafür gibt es einfach viel zu viel zu sehen, einzustellen und zu kontrollieren. Dass wirklich Tolle aber ist, dass fast all diese Hebel, Schalte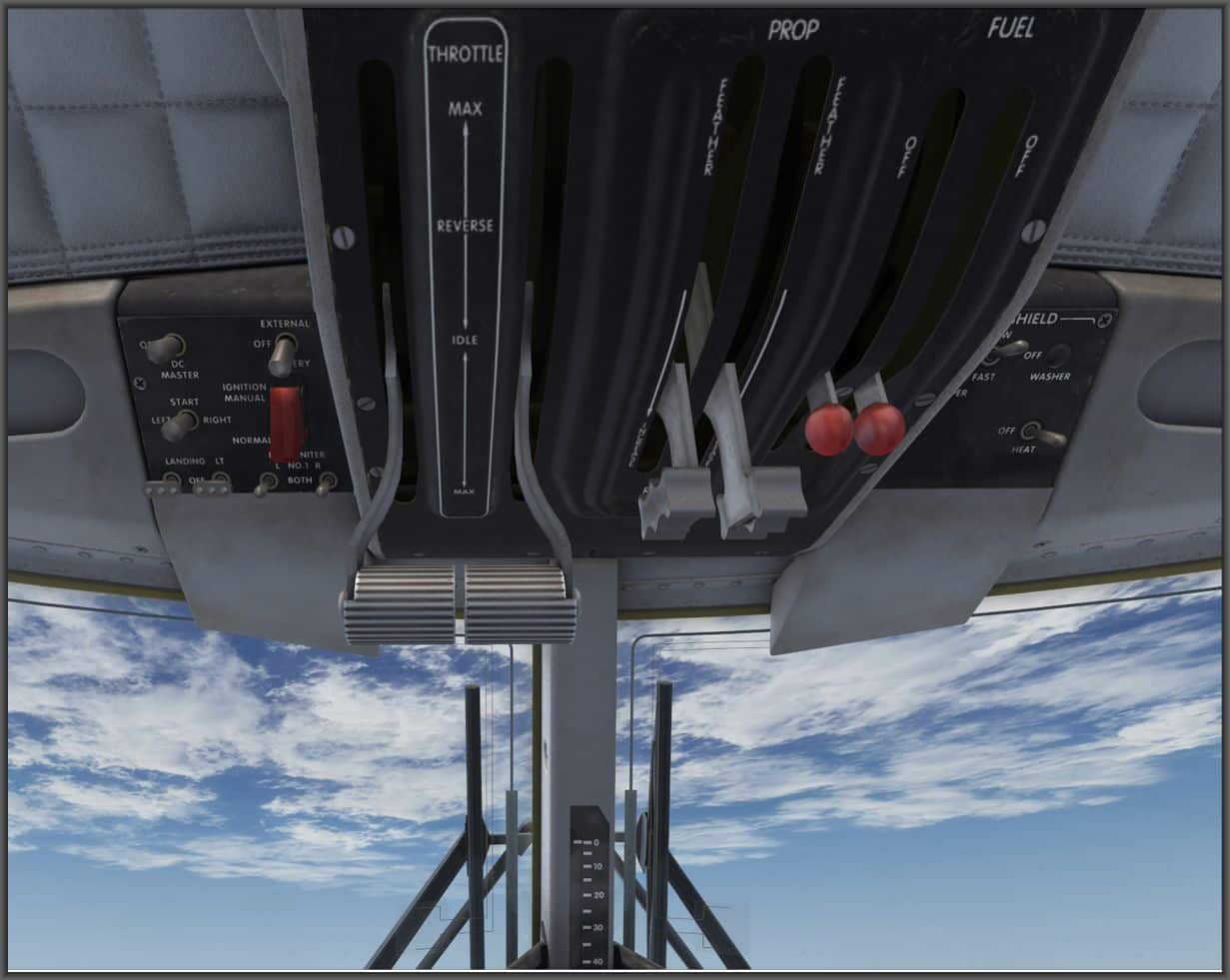 r und Instrumente innerhalb der Systemlogik wirken, für die sie gebaut und benötigt werden! Interessant auch die Platzierung der Schubregler, Propeller Regler und der Conditions Lever. Sie alle befinden sich, aus konstruktionsbedingten Gründen, im Overhead Panel. Beim Rollen, Starten oder im Landeanflug muss man da schon mal länger den Arm hochhalten. Das erspare ich mir aber in der Simulation, indem ich zu Hause die Regler über einen Quadranten Throttel steuere, der an der Tischplatte und nicht an der Decke befestigt ist. Umständlich leider das ständige Hin- und Herspringen, um zu den verschiedenen Panelansichten in der 3D-Ansicht zu gelangen. Ständig ist man damit beschäftigt den Panel Selector zu bemühen, nur um einen Blick auf die Instrumente zu bekommen, die gerade eingestellt oder kontrolliert werden müssen. Außerdem ist es ratsam sich einen großen Bildschirm zuzulegen, um nicht ständig Zoomen zu müssen. Denn nur dann ist auch gut sichtbar, welches Instrument gerade eingestellt oder kontrolliert werden soll. Hier wünsche ich mir doch eine 2D-Ansicht, wo alle Instrumente und Hebel in einem Blick zur Verfügung gestellt werden. Hier hat zum Beispiel Friendly Flusi gezeigt, mit ihren Panelkonstrukten, wie so etwas sinnvollerweise funktionieren könnte. In diesen Panelkonstrukten hat der Simmer alle Instrumente und Hebel übersichtlich vor sich. Er kann sich ganz auf den Workload der einzelnen Flugphasen konzentrieren, ohne von dem ständigen Geklicke zu den Ansichten abgelenkt zu werden. Bei kleineren Maschinen, mit einer geringeren Anzahl an Instrumenten, mag eine 3D-Ansicht ausreichen, aber nicht bei der Twin Otter. Deren umfangreiche und komplexe Instrumentierung erfordert eine andauernde Aufmerksamkeit. Dies erfordert zwingend ein häufiges Hin- und Herschwenken des Blicks. Und bei diesem Add On ist nun einmal Aufmerksamkeit und Genauigkeit gefragt, wie wir noch sehen werden. Das lässt es eben aber auch sehr realistisch wirken.
r und Instrumente innerhalb der Systemlogik wirken, für die sie gebaut und benötigt werden! Interessant auch die Platzierung der Schubregler, Propeller Regler und der Conditions Lever. Sie alle befinden sich, aus konstruktionsbedingten Gründen, im Overhead Panel. Beim Rollen, Starten oder im Landeanflug muss man da schon mal länger den Arm hochhalten. Das erspare ich mir aber in der Simulation, indem ich zu Hause die Regler über einen Quadranten Throttel steuere, der an der Tischplatte und nicht an der Decke befestigt ist. Umständlich leider das ständige Hin- und Herspringen, um zu den verschiedenen Panelansichten in der 3D-Ansicht zu gelangen. Ständig ist man damit beschäftigt den Panel Selector zu bemühen, nur um einen Blick auf die Instrumente zu bekommen, die gerade eingestellt oder kontrolliert werden müssen. Außerdem ist es ratsam sich einen großen Bildschirm zuzulegen, um nicht ständig Zoomen zu müssen. Denn nur dann ist auch gut sichtbar, welches Instrument gerade eingestellt oder kontrolliert werden soll. Hier wünsche ich mir doch eine 2D-Ansicht, wo alle Instrumente und Hebel in einem Blick zur Verfügung gestellt werden. Hier hat zum Beispiel Friendly Flusi gezeigt, mit ihren Panelkonstrukten, wie so etwas sinnvollerweise funktionieren könnte. In diesen Panelkonstrukten hat der Simmer alle Instrumente und Hebel übersichtlich vor sich. Er kann sich ganz auf den Workload der einzelnen Flugphasen konzentrieren, ohne von dem ständigen Geklicke zu den Ansichten abgelenkt zu werden. Bei kleineren Maschinen, mit einer geringeren Anzahl an Instrumenten, mag eine 3D-Ansicht ausreichen, aber nicht bei der Twin Otter. Deren umfangreiche und komplexe Instrumentierung erfordert eine andauernde Aufmerksamkeit. Dies erfordert zwingend ein häufiges Hin- und Herschwenken des Blicks. Und bei diesem Add On ist nun einmal Aufmerksamkeit und Genauigkeit gefragt, wie wir noch sehen werden. Das lässt es eben aber auch sehr realistisch wirken.
Die Simulationstiefe – hart an der Realität
Diese Maschine ist sowohl für VFR und IFR Flüge ausgestattet. Sowohl ADF Finder und VOR Anzeigesysteme existieren und funktionieren wie real. Auch ein einfacher Autopilot, zum Halten der Höhe, des Steuerkurses etc. existiert. Eine automatische Schubkontrolle kennt der Autopilot allerdings nicht, genau so wenig wie die Modis Flight Level Change oder ALT HOLD, der die Maschine, bei Erreichen einer vorgewählten Höhe, in den Level Off Zustand versetzt. Dies entspricht aber auch dem realen Vorbild. Hier muss der Pilot sich um den Höhe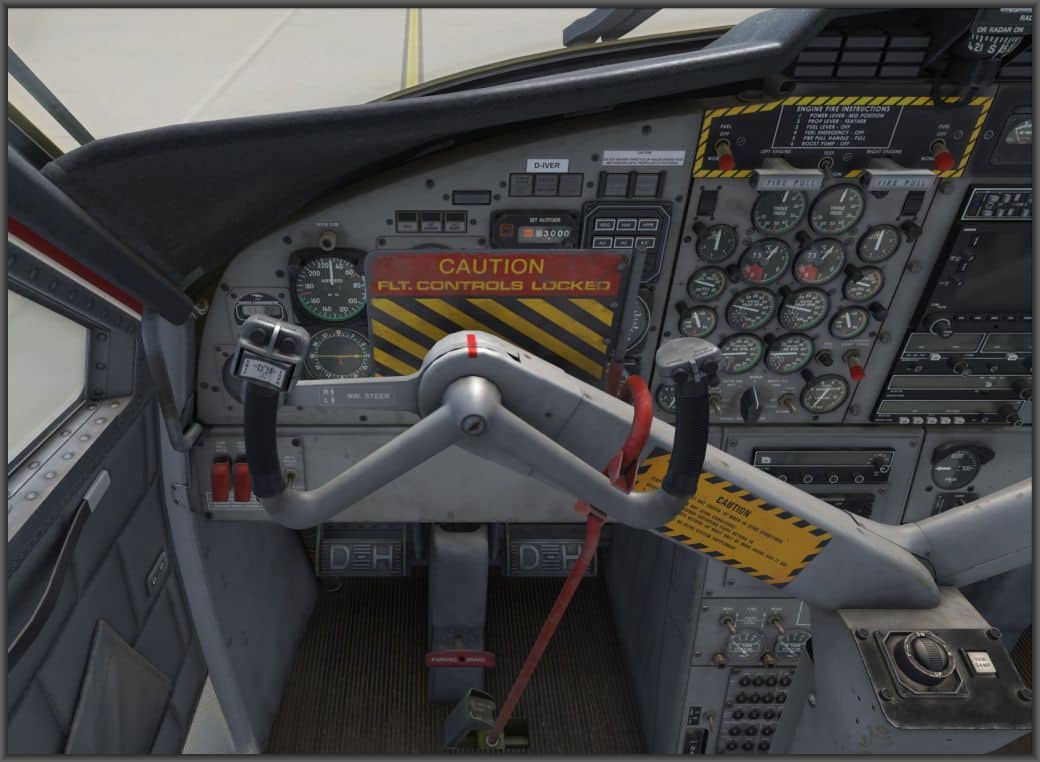 nwechsel, und vieles andere mehr, noch selber darum kümmern. Auch die Abarbeitung der Checklisten, in der vorgegebenen Reihenfolge, ist realistisch abgebildet. Aktivieren wir laut Checkliste den Schalter Anti Coll, um das Antikollisionslicht einzuschalten, dann blinkt dieses noch lange nicht, solange wir die Batterie nicht eingeschaltet haben. Oder ist die Maschine im Freien abgestellt, dann bewirkt eine Rudersperre (Guest Lock), dass, bei starkem Wind, die Ruder von hinten nicht gegen die Anschläge schlagen können. Diese Rudersperre muss natürlich erst einmal gelöst werden, indem der Control Lock auf Off gesetzt wird. Erst dann kann z.B. die Beweglichkeit der Ruder geprüft werden.
nwechsel, und vieles andere mehr, noch selber darum kümmern. Auch die Abarbeitung der Checklisten, in der vorgegebenen Reihenfolge, ist realistisch abgebildet. Aktivieren wir laut Checkliste den Schalter Anti Coll, um das Antikollisionslicht einzuschalten, dann blinkt dieses noch lange nicht, solange wir die Batterie nicht eingeschaltet haben. Oder ist die Maschine im Freien abgestellt, dann bewirkt eine Rudersperre (Guest Lock), dass, bei starkem Wind, die Ruder von hinten nicht gegen die Anschläge schlagen können. Diese Rudersperre muss natürlich erst einmal gelöst werden, indem der Control Lock auf Off gesetzt wird. Erst dann kann z.B. die Beweglichkeit der Ruder geprüft werden.
Ein Schwerpunkt der Simulation ist die Nachbildung des komplexen Motorenmanagementsystems der Twin Otter. Für jene Simmer unter uns, die bisher nur mit kolbengetriebenen Propellermaschinen unterwegs waren, ist das Fliegen mit einer turbinengetriebenen Propellermaschine eine echte Herausforderung. 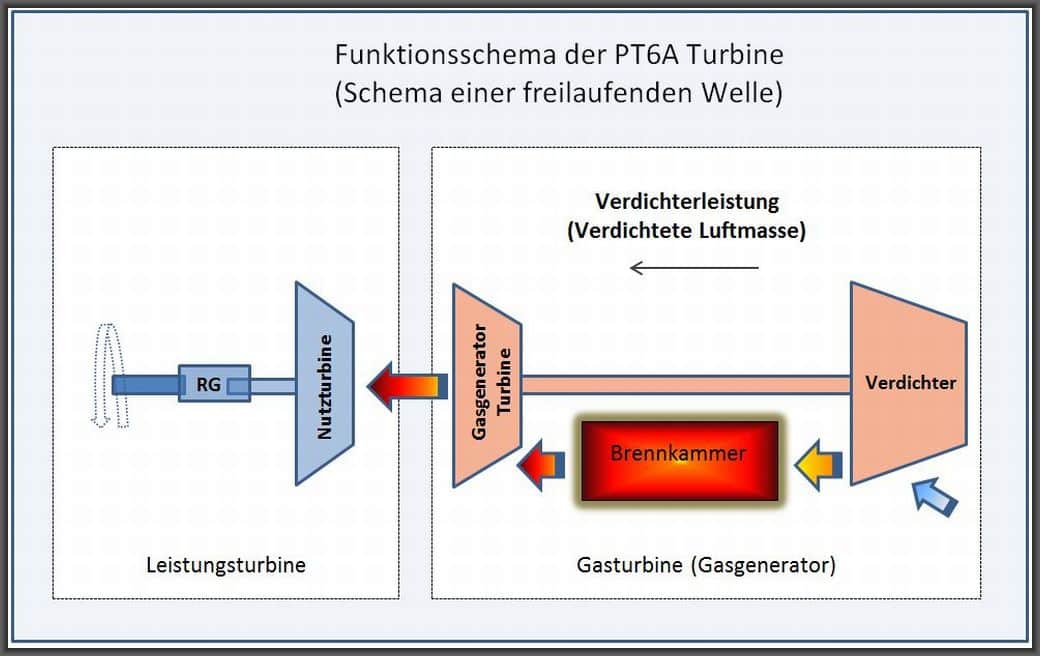 Die Komplexität des Motorenmanagementsys- tems hängt im Wesent- lichen mit der PT6-A Turbine zusammen, die in der Twin Otter DHC-6 300 eingebaut ist. Am Beispiel der Skizze wird das Funktionsschema der PT6-A Turbine deutlich. In der Turbine werden die Propeller indirekt durch eine Gasturbine angetrie- ben. Die Gasturbine erzeugt einen hochverdichteten Gasstrom, der in der Brennkammer gezündet wird, wodurch sehr heiße Gase entstehen. Der heiße Gasstrom wird jedoch nicht, wie bei den Düsenjets üblich, zur unmittelbaren Erzeugung des Schubs verwendet, sondern um die Turbinenschaufeln der Leistungs
Die Komplexität des Motorenmanagementsys- tems hängt im Wesent- lichen mit der PT6-A Turbine zusammen, die in der Twin Otter DHC-6 300 eingebaut ist. Am Beispiel der Skizze wird das Funktionsschema der PT6-A Turbine deutlich. In der Turbine werden die Propeller indirekt durch eine Gasturbine angetrie- ben. Die Gasturbine erzeugt einen hochverdichteten Gasstrom, der in der Brennkammer gezündet wird, wodurch sehr heiße Gase entstehen. Der heiße Gasstrom wird jedoch nicht, wie bei den Düsenjets üblich, zur unmittelbaren Erzeugung des Schubs verwendet, sondern um die Turbinenschaufeln der Leistungs turbine anzutreiben. Diese treibt über die Reduction Gearbox (RG), ein sogenanntes Untersetzungsgetriebe, schließlich den Propeller an. Das Untersetzungsgetriebe ist erforder- lich, weil bei der Twin Otter DHC-6 300 die Turbinendrehzahl der PT6-A Turbine bei ca. 38.000 U/min liegt, der Propeller aber maximal nur mit ca. 2.100 U/min läuft. Der Propeller erzeugt dann, wie bei einem kolbengetriebenen Propeller, den erforderlichen Schub. So gesehen besteht der Motor der Twin Otter aus zwei Turbinen: Der Gasturbine und der Leistungsturbine. Das macht sich beim Anlassvorgang des Motors der Twin Otter bemerkbar. Wird der Motor angelassen, dann „heult“ zuerst die Gasturbine auf und kommt auf Touren. Die Leistungsturbine, welche den Propeller antreibt, dreht sich in diesem Moment noch nicht. Denn die Wellen der beiden Turbinen sind voneinander getrennt. Darum spricht man bei der PT6-A Turbine auch von einer sogenannten Freilaufturbine. Wir können dies auch am Zeiger des Drehmomentmessers gut erkennen, der sich noch nicht bewegt und das Drehmoment an der Propellerwelle angibt. Der in der Twin Otter eingebaute Drehmomentmesser zeigt dabei das Drehmoment, für uns eher ungewöhnlich, in der angloamerikanischen Einheit Pund-force per square inch (p.s.i, Pfund pro Quadratzoll) an. Das hängt damit zusammen, dass das Drehmoment oft als hydraulischer Widerstand im Untersetzungsgetriebe der Turbine gemessen und dort als proportionaler Druckwert abgenommen wird. Letztlich gibt das Drehmoment Auskunft darüber, mit welcher Kraft der Propeller angetrieben wird. Bei 50 p.s.i wirkt auf die Propellerwelle ein Drehmoment von 2096 Nm, die jeweils eine Leistung von 462 kW (ca. 628 PS) zur Verfügung stellt. Zum Vergleich: ein 2,0 Liter Cessna 172 Kolbenmotor leistet 99 kw (135 PS) und erreicht ein Drehmoment von maximal 410 Nm. Besser wäre es aus meiner Sicht, wenn das Drehmoment als relativer Prozentwert ausgegeben wird. Denn die Messmethode, in welcher Größe das Drehmoment relativ gemessen wird, kann mir als Pilot ziemlich egal sein. Die Entwickler halten sich aber daran, die Anzeige des Drehmoments als Druckgröße auszugeben, wie es eben in der realen Maschine auch der Fall ist.
turbine anzutreiben. Diese treibt über die Reduction Gearbox (RG), ein sogenanntes Untersetzungsgetriebe, schließlich den Propeller an. Das Untersetzungsgetriebe ist erforder- lich, weil bei der Twin Otter DHC-6 300 die Turbinendrehzahl der PT6-A Turbine bei ca. 38.000 U/min liegt, der Propeller aber maximal nur mit ca. 2.100 U/min läuft. Der Propeller erzeugt dann, wie bei einem kolbengetriebenen Propeller, den erforderlichen Schub. So gesehen besteht der Motor der Twin Otter aus zwei Turbinen: Der Gasturbine und der Leistungsturbine. Das macht sich beim Anlassvorgang des Motors der Twin Otter bemerkbar. Wird der Motor angelassen, dann „heult“ zuerst die Gasturbine auf und kommt auf Touren. Die Leistungsturbine, welche den Propeller antreibt, dreht sich in diesem Moment noch nicht. Denn die Wellen der beiden Turbinen sind voneinander getrennt. Darum spricht man bei der PT6-A Turbine auch von einer sogenannten Freilaufturbine. Wir können dies auch am Zeiger des Drehmomentmessers gut erkennen, der sich noch nicht bewegt und das Drehmoment an der Propellerwelle angibt. Der in der Twin Otter eingebaute Drehmomentmesser zeigt dabei das Drehmoment, für uns eher ungewöhnlich, in der angloamerikanischen Einheit Pund-force per square inch (p.s.i, Pfund pro Quadratzoll) an. Das hängt damit zusammen, dass das Drehmoment oft als hydraulischer Widerstand im Untersetzungsgetriebe der Turbine gemessen und dort als proportionaler Druckwert abgenommen wird. Letztlich gibt das Drehmoment Auskunft darüber, mit welcher Kraft der Propeller angetrieben wird. Bei 50 p.s.i wirkt auf die Propellerwelle ein Drehmoment von 2096 Nm, die jeweils eine Leistung von 462 kW (ca. 628 PS) zur Verfügung stellt. Zum Vergleich: ein 2,0 Liter Cessna 172 Kolbenmotor leistet 99 kw (135 PS) und erreicht ein Drehmoment von maximal 410 Nm. Besser wäre es aus meiner Sicht, wenn das Drehmoment als relativer Prozentwert ausgegeben wird. Denn die Messmethode, in welcher Größe das Drehmoment relativ gemessen wird, kann mir als Pilot ziemlich egal sein. Die Entwickler halten sich aber daran, die Anzeige des Drehmoments als Druckgröße auszugeben, wie es eben in der realen Maschine auch der Fall ist.
Erst durch das Ziehen der Condition Levers, erkennbar an den Hebeln mit den roten Knöpfen im Overheadpanel, wird dem komprimierten Gasstrom in der Brennstoffkammer Treibstoff hinzugefügt und dieses Gemisch in der Brennkammer gezündet wird. Zu beachten ist hierbei, dass die vom Verdichter komprimierte Luftmasse nur zum kleineren Teil in der Brennkammer mit dem Treibstoff vermischt und verbrannt wird. Der größere Teil der komprimierten Luftmasse wird zur Kühlung der Brennkammerwände benötigt. Dies ist notwendig, weil die Flamme in der Brennkammer kontinuierlich brennt und 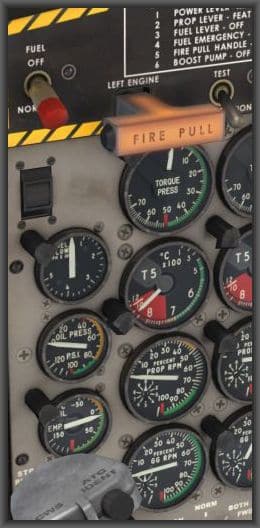 eine Temperatur von ca. 2.000 C° und mehr hat. Keine noch so stabile Metalllegierung hält auf Dauer solche Temperaturen aus. So muss der Pilot bzw. Simmer sicherstellen, dass die Verdichter der Gasturbine eine ausreichend große komprimierte Luftmasse erzeugen, damit die Luftmasse diese beiden Funktionen erfüllen kann. Insbesondere beim Hochfahren der Propellerturbine muss die Drehzahlanzeige der Gasturbine N1 mindesten 12% betragen. Erst dadurch wird ein ausreichender Luftmassenstrom, für Kühlung und Zündung, von den Verdichtern der Gasturbine zur Verfügung gestellt. Ist dieser Wert kleiner als 12% und der Pilot führt dennoch Treibstoff in die Brennkammer ein zündet dieser. Dann kommt es zum gefürchteten Hot Start, der in der Regel die Turbine zerstört. Leider unterlief mir gleich beim ersten Start dieses Missgeschick. Ich hatte die Condition Levers für die Treibstoffzufuhr zu früh gezogen, um die Propellerturbine zu starten, ohne auf N1 zu achten. Diese
eine Temperatur von ca. 2.000 C° und mehr hat. Keine noch so stabile Metalllegierung hält auf Dauer solche Temperaturen aus. So muss der Pilot bzw. Simmer sicherstellen, dass die Verdichter der Gasturbine eine ausreichend große komprimierte Luftmasse erzeugen, damit die Luftmasse diese beiden Funktionen erfüllen kann. Insbesondere beim Hochfahren der Propellerturbine muss die Drehzahlanzeige der Gasturbine N1 mindesten 12% betragen. Erst dadurch wird ein ausreichender Luftmassenstrom, für Kühlung und Zündung, von den Verdichtern der Gasturbine zur Verfügung gestellt. Ist dieser Wert kleiner als 12% und der Pilot führt dennoch Treibstoff in die Brennkammer ein zündet dieser. Dann kommt es zum gefürchteten Hot Start, der in der Regel die Turbine zerstört. Leider unterlief mir gleich beim ersten Start dieses Missgeschick. Ich hatte die Condition Levers für die Treibstoffzufuhr zu früh gezogen, um die Propellerturbine zu starten, ohne auf N1 zu achten. Diese  Unachtsamkeit hat die Turbinentemperatur rasch ansteigen lassen, wie man am Temperatur- anzeigegerät T5 gut erkennen kann und in Folge die Turbine in Brand gesetzt. Die Temperatur wird oft zwischen den Turbinenstufen gemessen, wobei die Nummer (hier die 5) im Temperaturanzeigegerät in der Regel angibt, an welcher Turbinenstufe die Messung erfolgt. Auch während des Fluges kann ein Triebwerk in Brand geraten, wie es mir leider auf einen meiner abendlichen Rundflüge passierte. Ein hässlich klingelnder Feueralarm und das Aufleuchten einer der beiden Feuerlöschergriffe (Fire extinguisher Handle) , vom
Unachtsamkeit hat die Turbinentemperatur rasch ansteigen lassen, wie man am Temperatur- anzeigegerät T5 gut erkennen kann und in Folge die Turbine in Brand gesetzt. Die Temperatur wird oft zwischen den Turbinenstufen gemessen, wobei die Nummer (hier die 5) im Temperaturanzeigegerät in der Regel angibt, an welcher Turbinenstufe die Messung erfolgt. Auch während des Fluges kann ein Triebwerk in Brand geraten, wie es mir leider auf einen meiner abendlichen Rundflüge passierte. Ein hässlich klingelnder Feueralarm und das Aufleuchten einer der beiden Feuerlöschergriffe (Fire extinguisher Handle) , vom  betroffenen Triebwerk, signalisieren dem Piloten eindeutig, dass gerade eine Turbine dabei ist „abzurauchen“. Hier hilft nur noch die Treibstoffzufuhr zu unterbrechen und den Feuerlöschergriff ziehen, um das Feuer in der Turbine zu löschen! Gut, dass mir das nur in der Simulation passiert ist. In der Realität wäre nun eine umfangreiche und teure Reparatur nötig, um die Twin Otter wieder flott zu machen.
betroffenen Triebwerk, signalisieren dem Piloten eindeutig, dass gerade eine Turbine dabei ist „abzurauchen“. Hier hilft nur noch die Treibstoffzufuhr zu unterbrechen und den Feuerlöschergriff ziehen, um das Feuer in der Turbine zu löschen! Gut, dass mir das nur in der Simulation passiert ist. In der Realität wäre nun eine umfangreiche und teure Reparatur nötig, um die Twin Otter wieder flott zu machen.
Der sachkundige Simmer wird erkennen, dass die Twin Otter mit einem Constant Speed Propeller ausgestattet ist. Werden die Schubhebel (Power Levers) nach vorne geschoben, dann dreht sich keineswegs der Propeller schneller, wie man meinen möchte. Der Pilot „sagt“ dem Propeller nur: Pass auf! Ich gebe dir jetzt mehr Gas und damit Energie. Dafür möchte ich aber mehr Schub von dir sehen. Schließlich will ich schneller fliegen, um noch vor Anbruch der Dunkelheit wieder zu Hause sein. Also streng dich an. Für den Propeller ist das die Aufforderung eine größere Luftmasse nach hinten zu schaufeln, um die angeforderte Geschwindigkeit zu erreichen. Das kann dem Propeller aber nur gelingen, wenn der Anstellwinkel der Propellerblätter (Propellerpitch) gegenüber der anströmenden Luft erhöht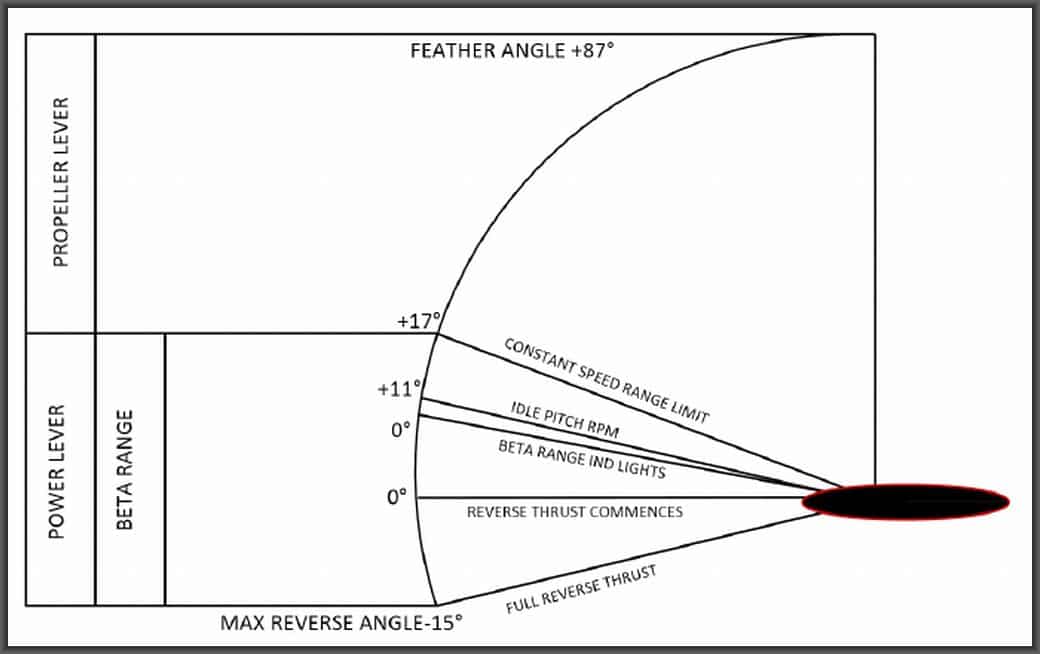 wird. Über die Schubhebel wird aber nur, im Alpha Range Bereich(!), lediglich der Ladedruck bzw. der Luftmassendurchsatz in der Turbine erhöht, wodurch mehr Treibstoff verbrannt und kinetische Energie erzeugt wird. Dadurch wirkt eine größere Kraft auf die Antriebswelle des Propellers. Der Drehmomentmesser zeigt die Zunahme dieser Kraft an. Ein im Untersetzungsgetriebe eingebauter Drehzahlregler, der Governor, vergrößert nun die Propellersteigung soweit, dass die eingestellte Drehzahl des Propellers gehalten wird. Durch die größere Propellersteigung wird ein größerer Schub realisiert, da eine größere Luftmasse nach hinten bewegt wird. Wird der Ladedruck dagegen verringert, dann verringert sich auch das Drehmoment, das auf die Antriebswelle des Propellers wirkt. Der Covernor verkleinert nun die Propellersteigung, wobei auch hier die Drehzahl des Propellers nicht verändert wird. Dadurch wird nun eine geringere Luftmasse nach hinten bewegt, wodurch der Schub geringer wird. Auch die Drehzahl des Propellers, die über die Propeller Levers eingestellt wird, wird letztlich über die Veränderung des Anstellwinkels der Propellerblätter vom Governor reguliert. Wird die Drehzahl des Propellers erhöht, dann wird der Anstellwinkel des Propellers verringert und umgekehrt. Insgesamt hängt somit die Leistung, die der Propeller erbringen kann, sowohl von der Stellung des Schubhebels, als auch der Propeller Levers ab.
wird. Über die Schubhebel wird aber nur, im Alpha Range Bereich(!), lediglich der Ladedruck bzw. der Luftmassendurchsatz in der Turbine erhöht, wodurch mehr Treibstoff verbrannt und kinetische Energie erzeugt wird. Dadurch wirkt eine größere Kraft auf die Antriebswelle des Propellers. Der Drehmomentmesser zeigt die Zunahme dieser Kraft an. Ein im Untersetzungsgetriebe eingebauter Drehzahlregler, der Governor, vergrößert nun die Propellersteigung soweit, dass die eingestellte Drehzahl des Propellers gehalten wird. Durch die größere Propellersteigung wird ein größerer Schub realisiert, da eine größere Luftmasse nach hinten bewegt wird. Wird der Ladedruck dagegen verringert, dann verringert sich auch das Drehmoment, das auf die Antriebswelle des Propellers wirkt. Der Covernor verkleinert nun die Propellersteigung, wobei auch hier die Drehzahl des Propellers nicht verändert wird. Dadurch wird nun eine geringere Luftmasse nach hinten bewegt, wodurch der Schub geringer wird. Auch die Drehzahl des Propellers, die über die Propeller Levers eingestellt wird, wird letztlich über die Veränderung des Anstellwinkels der Propellerblätter vom Governor reguliert. Wird die Drehzahl des Propellers erhöht, dann wird der Anstellwinkel des Propellers verringert und umgekehrt. Insgesamt hängt somit die Leistung, die der Propeller erbringen kann, sowohl von der Stellung des Schubhebels, als auch der Propeller Levers ab.
Dies funktioniert allerdings alles nur innerhalb bestimmter Grenzen. Letztlich muss der Pilot bzw. Simmer aus den Leistungstabellen die empfohlene Kombination aus Drehmoment und Drehzahl entnehmen, um die größtmögliche Propellereffizienz in den verschiedenen Flugphasen zu erzielen. Wer nicht in die Leistungstabellen reinschauen will, trotzdem keinen Nervenzusammenbruch erleiden möchte, wegen ständigem Crash der Simulation, merkt sich einfach: Beim Start und im Steigflug ist das Drehmoment die limitierende Größe, diese darf nicht über 50 p.s.i sein. Die Propellerdrehzahl sollte man knapp bei 100 % stehen lassen. In der Höhe ist die Turbinentemperatur T5 die limitierende Größe. Diese darf nicht größer als als 725 C° sein. Der Grund: Je höher die Twin Otter steigt, desto dünner wird die Luft, desto weniger Luftmasse gelangt in die Turbine zur Kühlung der Brennkammer. Das läßt die Temperatur langsam aber stetig steigen, wie in der Simulation sehr schön gezeigt wird. Deswegen müssen die Power Levers auch etwas zurückgenommen werden. Dadurch gelangt weniger Treibstoff in die Brennkammer. Auch die Propellerdrehzahl sollte etwas reduziert werden. Hierdurch erhöht sich der Anstellwinkel und es wird eine größere Luftmasse nach hinten befördert. Das ist gut so, um eine günstigere Schubleistung zu erzielen. Die Anzeigenadeln der Triebwerksinstrumente sollten nicht die rote Markierung bzw. den roten Bereich überschreiten. Hält sich der Simmer an diese Empfehlung, dann bestehen gute Aussichten, dass in der Simulation die Twin Otter nicht allzu häufig crasht.
Auch einen sogenannten Beta Range Bereich gibt es. In diesem befindet man sich, wenn die Twin Otter am Boden rollt. Der Anstellwinkel des Propellers ist dann sehr gering. Ist der Anstellwinkel gleich Null, dann erzeugt der Propeller überhaupt keine Schubkraft mehr. Auch ein negativer Anstellwinkel ist im Beta Range Bereich möglich. Er wird dazu benötigt die Twin Otter rückwärts rollen zu lassen, was ebenfalls simuliert wird. Man zieht dazu einfach den Schubhebel in den Reverse Bereich. Dies aber bitte langsam, da sich sonst die Twin Otter wie ein Hengst aufstellt! Die Twin Otter ist zwar vor einem Tailstrike geschützt, da sie einen Hecksporn (Tailbumper) besitzt, der das Flugzeug vor Beschädigungen am Heck schützt. Trotzdem sollte das Entstehen einer solchen Situation tunlichst vermieden werden. Denn wenn das Flugzeug nach vorne auf das Bugrad zurückfällt, dann kann nicht ausgeschlossen werden, dass hierbei die hydraulische Bugradfederung beschädigt wird. Und dies, trotz des robusten Fahrwerks der Twin Otter. Den größten Anstellwinkel hat der Propeller, wenn er in Segelstellung gebracht wird. Dies ist zum Beispiel dann wichtig, wenn eine Turbine beim Start ausfällt. Ist dies der Fall, dann erzeugt der Propeller plötzlich keinen Schub mehr, sondern wirkt, aufgrund des flachen Anstellwinkels der Propellerblätter, ganz im Gegenteil wie eine gewaltige Bremse. Das muss unbedingt vermieden werden, indem die Blätter automatisch in die Segelflugstellung (Feathering) gebracht werden. Dieses Ereignis, das man keinem Piloten in der realen Welt wünschen möchte, wird von der Simulation recht gut nachgestellt. Die Auswirkungen eines Propellerstillstands auf das Flugverhalten und die erforderlichen Gegenmaßnahmen können hier ausführlich ausprobiert werden.
Beta Range Bereich möglich. Er wird dazu benötigt die Twin Otter rückwärts rollen zu lassen, was ebenfalls simuliert wird. Man zieht dazu einfach den Schubhebel in den Reverse Bereich. Dies aber bitte langsam, da sich sonst die Twin Otter wie ein Hengst aufstellt! Die Twin Otter ist zwar vor einem Tailstrike geschützt, da sie einen Hecksporn (Tailbumper) besitzt, der das Flugzeug vor Beschädigungen am Heck schützt. Trotzdem sollte das Entstehen einer solchen Situation tunlichst vermieden werden. Denn wenn das Flugzeug nach vorne auf das Bugrad zurückfällt, dann kann nicht ausgeschlossen werden, dass hierbei die hydraulische Bugradfederung beschädigt wird. Und dies, trotz des robusten Fahrwerks der Twin Otter. Den größten Anstellwinkel hat der Propeller, wenn er in Segelstellung gebracht wird. Dies ist zum Beispiel dann wichtig, wenn eine Turbine beim Start ausfällt. Ist dies der Fall, dann erzeugt der Propeller plötzlich keinen Schub mehr, sondern wirkt, aufgrund des flachen Anstellwinkels der Propellerblätter, ganz im Gegenteil wie eine gewaltige Bremse. Das muss unbedingt vermieden werden, indem die Blätter automatisch in die Segelflugstellung (Feathering) gebracht werden. Dieses Ereignis, das man keinem Piloten in der realen Welt wünschen möchte, wird von der Simulation recht gut nachgestellt. Die Auswirkungen eines Propellerstillstands auf das Flugverhalten und die erforderlichen Gegenmaßnahmen können hier ausführlich ausprobiert werden.
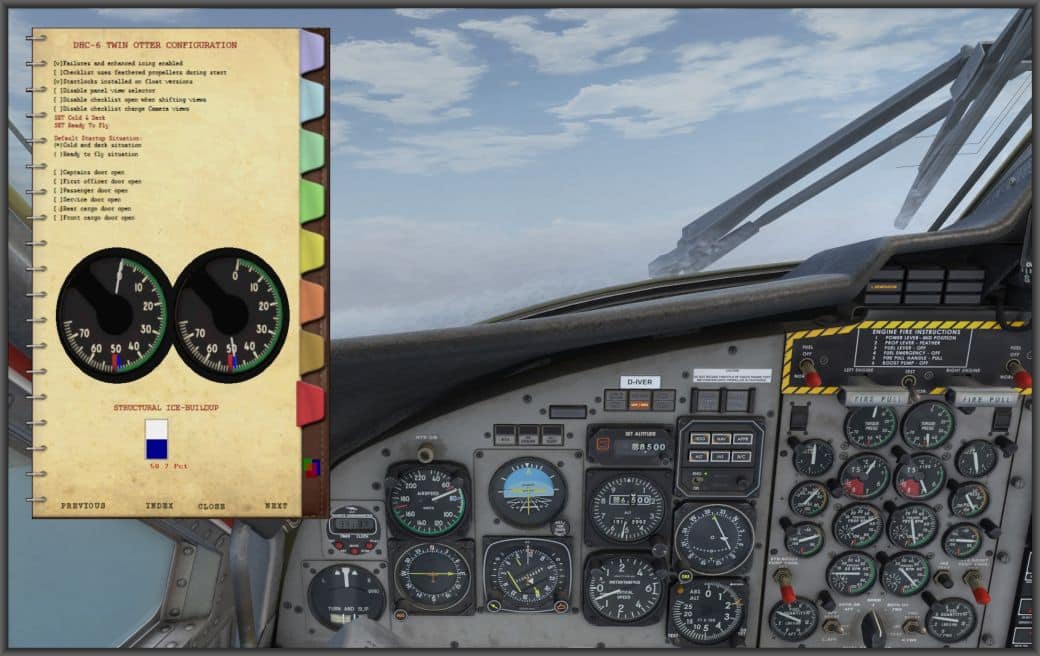 Aufpassen muss der Simmer auch, wenn es langsam (nicht plötzlich!) zu einem Abfall des Drehmoments kommt oder der Fahrtmesser ausfällt, was zunächst scheinbar nicht zu erklären ist. Dann muss geprüft werden, ob es eventuell ein Vereisungsproblem gibt. Ist dies der Fall, dann sind sofort die Enteisungssysteme zu starten, damit nicht ein unkontrollierter Flugzustand eintritt. Auch diese potentielle Gefahr, baut sich in der Simulation „eiskalt“ realistisch auf, wenn man denn nicht aufpasst. Höflich ist es von den Entwicklern gemeint, wenn sie den Grad der Vereisung auf dem Deckel der Mappe, welche die Checklisten enthält, durch ein vertikales Balkendiagramm darstellen. Je mehr sich dieses Balkendiagramm blau einfärbt, desto stärker die Belastung wichtiger Strukturkomponenten mit Eisansatz, was im weiteren Verlauf unweigerlich die Funktion dieser Komponenten einschränkt bzw. ausfallen lässt. Diese optische Anzeige ist sicherlich fürsorglich gemeint, aber dennoch eher unrealistisch. Die Twin Otter DHC-6 300 selber besitzt in der Realität kein optisches Warnsystem, welches den Piloten davor warnt, dass bestimmte Strukturkomponenten des Flugzeugs gerade dabei sind zu vereisen.
Aufpassen muss der Simmer auch, wenn es langsam (nicht plötzlich!) zu einem Abfall des Drehmoments kommt oder der Fahrtmesser ausfällt, was zunächst scheinbar nicht zu erklären ist. Dann muss geprüft werden, ob es eventuell ein Vereisungsproblem gibt. Ist dies der Fall, dann sind sofort die Enteisungssysteme zu starten, damit nicht ein unkontrollierter Flugzustand eintritt. Auch diese potentielle Gefahr, baut sich in der Simulation „eiskalt“ realistisch auf, wenn man denn nicht aufpasst. Höflich ist es von den Entwicklern gemeint, wenn sie den Grad der Vereisung auf dem Deckel der Mappe, welche die Checklisten enthält, durch ein vertikales Balkendiagramm darstellen. Je mehr sich dieses Balkendiagramm blau einfärbt, desto stärker die Belastung wichtiger Strukturkomponenten mit Eisansatz, was im weiteren Verlauf unweigerlich die Funktion dieser Komponenten einschränkt bzw. ausfallen lässt. Diese optische Anzeige ist sicherlich fürsorglich gemeint, aber dennoch eher unrealistisch. Die Twin Otter DHC-6 300 selber besitzt in der Realität kein optisches Warnsystem, welches den Piloten davor warnt, dass bestimmte Strukturkomponenten des Flugzeugs gerade dabei sind zu vereisen.
Die interaktive elektronische Mappe – eine sinnvolle Hilfe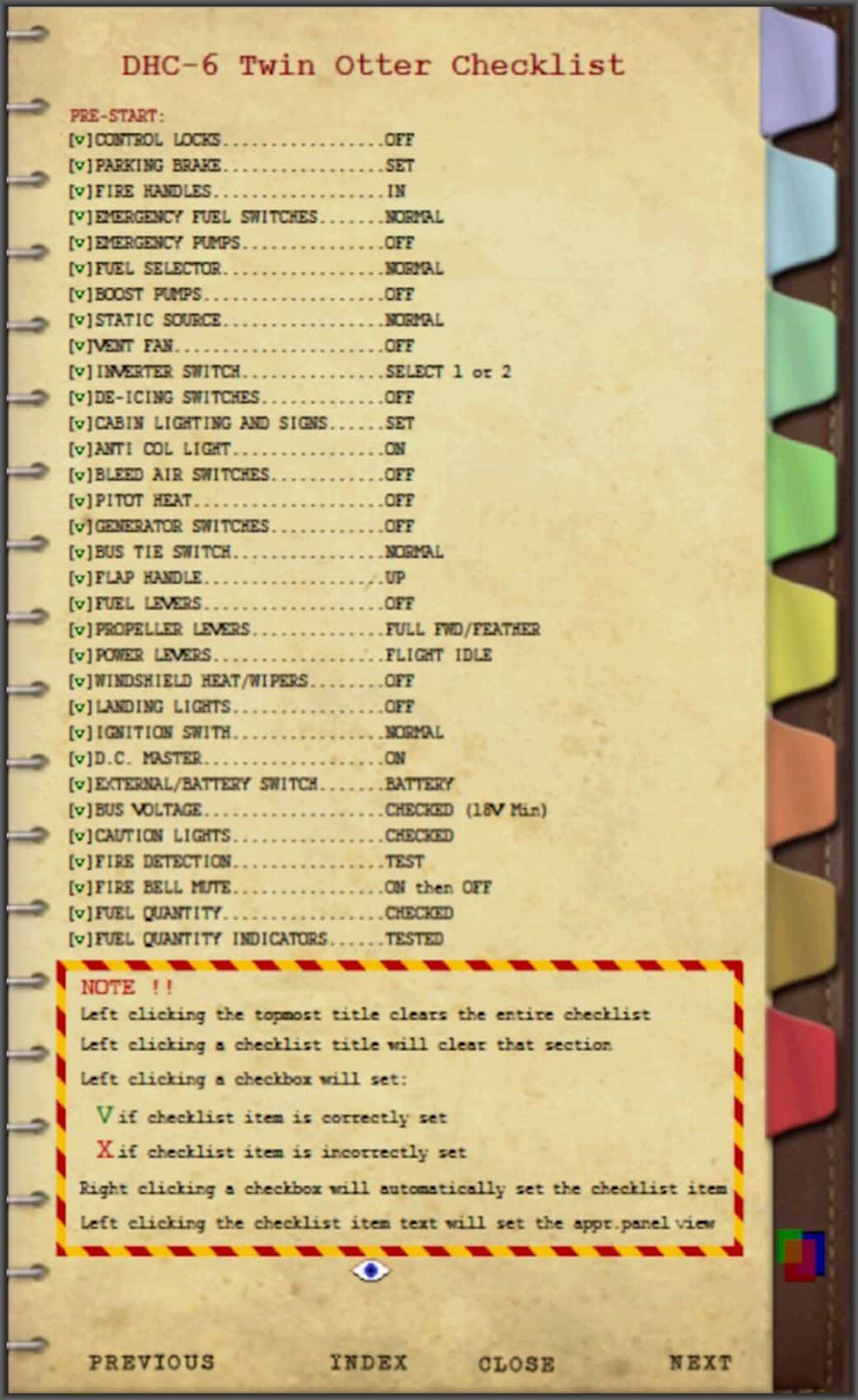
Was mich ebenfalls sehr überzeugt hat, ist die Art Weise, wie uns die Entwickler durch die Abarbeitung der Checklisten leiten. Hier werden nicht einfach Checklisten als PDF Dokument beigelegt, die man umständlich abarbeiten muss und wo man zeitaufwendig nach den Hebeln, Schaltern und Kontrolllämpchen suchen muss. Hier wird eine elektronische Mappe vorgelegt, welche die Checklisten, Optionen zur Fehlergenerierung und Konfigurationsanweisungen zum Startup einschließlich Leistungstabellen enthält. Der Clou dabei ist aber, dass die Checklisten sich interaktiv abarbeiten lassen. Dies wird dadurch erreicht, dass der Simmer jeden Punkt in der Checkliste, durch ein Klickereignis der linken Maustaste, bestätigen muss. Das System prüft dann, ob der entsprechende Schalter auch wirklich vom Simmer in die Stellung bewegt wurde, wie es erforderlich ist. Ein grünes v (wahrscheinlich die Abkürzung für verify) signalisiert, dass der Simmer die Aktion tatsächlich ausgeführt hat, ein rotes Kreuzchen, dass der Schalter bzw. die Prüfung nicht durchgeführt wurde. Findet man den Schalter oder das Instrument nicht, dann klickt man einfach auf den Listeneintrag in der Checkliste. Schon wird man zum Panelsegment geführt, welches das Instrument oder den Schalter enthält. Will man schneller bei der Abarbeitung der Checklisten vorankommen, dann klickt man mit der rechten Maustaste vor dem Listeneintrag. Dadurch wird der Hebel in die geforderte Stellung gebracht. Dies kann man sich auf dem Instrumentenbrett ansehen, da der Vorgang animiert wird. Für ganz Eilige (insbesondere den Feierabendfliegern), die sofort starten wollen, stellt die elektronische Mappe die Option Set Ready To Fly zur Verfügung. Wird diese Option vom Simmer angeklickt, dann werden die Propellerturbinen hochgefahren, zudem alle Funk- und Navigationsinstrumente in den Bereitschaftsmodus versetzt. Die Twin Otter befindet sich so, innerhalb von ca. 50 Sekunden, in einer startbereiten Konfiguration. Das sind ungefähr 15 Minuten Zeitersparnis gegenüber einem Startvorgang, der nach Checkliste durchgeführt wird, einschließlich der Standby Konfiguration der Avionic-, Funk- und Navigationsinstrumente. Das einzige, was mich an der Mappe mit den Checklisten so richtig stört, ist die Platzierung der Drehmomentanzeiger im Deckel der Mappe. Dies könnte den Simmer leichtfertig dazu verführen, beim Hochlaufen der Turbinen, nur auf diese beiden Drehmonentanzeiger zu blicken. Gleichzeitig würde er aber die anderen Instrumente, wie Öldruckanzeige, Hydraulik oder Stromgenerator etc. nicht beachten. Das wäre aber unrealistisch, weil diese Instrumente durch eine beachtliche Anzahl von Nebenaggregaten geregelt sind, die vom Turbinentriebwerk angetrieben werden.
Die Soundkulisse – So lärmt es in der Twin Otter
Verglichen mit der akustischen Kulisse der Twin Otter in Videos aus der Luftfahrt, hört sich der Sound der Motoren und anderer Krachmacher in der Simulation recht realistisch an. Die Entwickler haben den Hebeln, Scheibenwischern, Fluglagen die entsprechende Soundkulisse spendiert, die glaubhaft und plausibel klingen. Das hohe Pfeifen der Gasturbinen im Leerlauf, das dumpfe Hochfahren der Propeller, die Signalanlage der Feuerlöschanlage, das Quietschen der Bremsen oder das dumpfe Schlagen der Bugfederung, wenn die Twin Otter über eine unbefestigte Pisten rollt, all das wertet dieses Add On zusätzlich auf und erhöht den Spaß, den man mit dieser Maschine im Simulator haben kann.
 Beispielflug – Landung auf dem Acker
Beispielflug – Landung auf dem Acker
Um die STOL Eigenschaften und bestimmte Flugleistungen der Twin Otter kennenzulernen, führe ich zu- nächst einige Start- und Lande- übungen durch. Danach unter- nehme ich einen VFR Flug vom Victoria International Airport nach Hope. Die Ortschaft liegt 100 NM nordöstlich von Vancouver und besitzt einen kleinen Flugplatz, mit einer unbefestigten Ackerpiste, die nicht länger als 1.200 m ist. Die Wetterbedingungen sind herbstlich, 15 C° und CAVOK Bedingungen. Ich habe mir bereits eingeprägt, dass wichtige Betriebsparameter nicht überschritten werden dürfen, die ich mir vor dem Flug noch einmal in Erinnerung rufe: Torque nicht größer als 50 p.s.i, nicht mehr als 2.100 RPM und die Turbinentemperatur T5 nicht größer als 725° C. Nur innerhalb eines sehr kurzen Zeitlimits, in bestimmten Situationen, dürfen diese Werte überhaupt überschritten werden. Hält man sich daran, fliegt man zwar immer noch nicht besonders ökonomisch. Aber es bestehen gute Chancen den Flug zu überleben.
 Mit dem typischen Auf- heulen der Turbinen erwachen nacheinander die PT6-A Turbinen zum Leben. Nachdem ich alle anderen Systeme zur Mitarbeit ermuntert und eingeschaltet habe, den Flugplan in das GPS geladen habe, schalte ich als letztes noch den Flight Recorder ein. Diesen gibt es zwar nicht in der realen Twin Otter DHC-6 300, ist aber dennoch in der Simulation ein sinnvolles Instrument. So kann ich mir später noch einmal meine Start- and Landeübungen, die Flugroute und wichtige Flugparameter ansehen.
Mit dem typischen Auf- heulen der Turbinen erwachen nacheinander die PT6-A Turbinen zum Leben. Nachdem ich alle anderen Systeme zur Mitarbeit ermuntert und eingeschaltet habe, den Flugplan in das GPS geladen habe, schalte ich als letztes noch den Flight Recorder ein. Diesen gibt es zwar nicht in der realen Twin Otter DHC-6 300, ist aber dennoch in der Simulation ein sinnvolles Instrument. So kann ich mir später noch einmal meine Start- and Landeübungen, die Flugroute und wichtige Flugparameter ansehen.
Mit einem besonderen Lenkhebel zur Bugradsteuerung (Nose Wheel Steering Lever) steuere ich die Twin Otter über den Taxiway zum Rollhalt der Piste 27. Das Bugrad und das Hauptgestell federn angemessen ein, auch die Stöße, die durch die Unebenheiten der Rollflächen verursacht werden, werden re alistisch wiedergegeben. Mächtig knarrt dabei das Hauptgestell, so wie eine uralte Schlosstür. Dies hat wahrscheinlich mit der schweren Kiste zu tun, die ich in der Frachtversion der Twin Otter ständig dabei habe. Zügig rolle ich zum Start. Es sollte auch besser schnell gehen am Boden. Denn jede Turbine der Twin Otter genehmigt sich
alistisch wiedergegeben. Mächtig knarrt dabei das Hauptgestell, so wie eine uralte Schlosstür. Dies hat wahrscheinlich mit der schweren Kiste zu tun, die ich in der Frachtversion der Twin Otter ständig dabei habe. Zügig rolle ich zum Start. Es sollte auch besser schnell gehen am Boden. Denn jede Turbine der Twin Otter genehmigt sich  im Ground-Idle gute 9 Gallonen Jetfuel pro Stunde. Mit einem Take Off Gewicht von 5.216 kg, davon 873 kg Treibstoffgewicht, runde 450 Kilo unter dem Maximalen
im Ground-Idle gute 9 Gallonen Jetfuel pro Stunde. Mit einem Take Off Gewicht von 5.216 kg, davon 873 kg Treibstoffgewicht, runde 450 Kilo unter dem Maximalen  Höchstabfluggewicht (MTOW) rolle ich schwer beladen auf die Startpiste. Nach einem sehr kurzen Startlauf, mit einer sagenhaften STOL Take Off Distance von 1.100 ft, durchsteige ich gemütlich 3.000 ft, bei ca. 85 KIAS mit 1.200 fpm und einem Fuelflow von 410 PPH (231 Liter/h). Nach nur 6,6 Minuten Steigflug level ich bei 8.400 ft langsam aus und gehe bei 8.500 ft in den Reiseflug über. Nun begnügt sich die Turbine mit 260 PPH (146 l/h), bei einer Geschwindigkeit von
Höchstabfluggewicht (MTOW) rolle ich schwer beladen auf die Startpiste. Nach einem sehr kurzen Startlauf, mit einer sagenhaften STOL Take Off Distance von 1.100 ft, durchsteige ich gemütlich 3.000 ft, bei ca. 85 KIAS mit 1.200 fpm und einem Fuelflow von 410 PPH (231 Liter/h). Nach nur 6,6 Minuten Steigflug level ich bei 8.400 ft langsam aus und gehe bei 8.500 ft in den Reiseflug über. Nun begnügt sich die Turbine mit 260 PPH (146 l/h), bei einer Geschwindigkeit von  146 KIAS, die mir der Fahrtmesser zeigt. Die Propellerdrehzahl habe ich auf 91% reduziert. Der Drehmomentmesser zeigt mir 37 p.s.i und die Temperaturanzeige liegt bei 650 C°, 75 C° unter dem erlaubten Limit. Die Turbine ist jetzt nicht mehr durch den maximalen Torque, sondern durch die maximale Turbinentemperatur T5 limitiert. Nach ca. 7 min Reiseflug steige ich auf 18.500 ft. Ich möchte wissen, ob die in der Tabelle für diese Höhe angegebene maximale Cruise Power, mit meiner Instrumentenanzeige in Übereinstimmung steht. Nach ca. 6 min erreiche ich die Höhe. Der Drehmomentzeiger zeigt nun 37 p.s.i, der Fuel Flow liegt bei 280 PPH, und 170 KIAS liegen auf dem Fahrtmesser an. Die Daten, die mir die Instrumente liefern, stimmen nicht ganz mit den Daten der Leistungstabelle überein. Aber sie kommen diesen ziemlich nahe.
146 KIAS, die mir der Fahrtmesser zeigt. Die Propellerdrehzahl habe ich auf 91% reduziert. Der Drehmomentmesser zeigt mir 37 p.s.i und die Temperaturanzeige liegt bei 650 C°, 75 C° unter dem erlaubten Limit. Die Turbine ist jetzt nicht mehr durch den maximalen Torque, sondern durch die maximale Turbinentemperatur T5 limitiert. Nach ca. 7 min Reiseflug steige ich auf 18.500 ft. Ich möchte wissen, ob die in der Tabelle für diese Höhe angegebene maximale Cruise Power, mit meiner Instrumentenanzeige in Übereinstimmung steht. Nach ca. 6 min erreiche ich die Höhe. Der Drehmomentzeiger zeigt nun 37 p.s.i, der Fuel Flow liegt bei 280 PPH, und 170 KIAS liegen auf dem Fahrtmesser an. Die Daten, die mir die Instrumente liefern, stimmen nicht ganz mit den Daten der Leistungstabelle überein. Aber sie kommen diesen ziemlich nahe.
Im Reiseflug lässt sich die Höhe der Twin Otter, bei ruhiger Wetterlage und angepasster Trimmung, gut auf Steuerkurs halten, ohne den Autopiloten bemühen zu müssen. Die Trimmung der Ruderanlage und des Seitenruders reagiert sensibel auf Steuerimpulse, aber keineswegs aufgeregt und flatterig. Dennoch schal te ich den Autopiloten ein und aktiviere die Modis Steuerkurs und Höhe halten. Nach weiteren 3 Minuten schalte ich das GPS auf und lasse den Autopiloten im Modus NAV die Flugroute abfliegen. Obwohl ich mich ca. 12 Meilen nordwestlich vom Flugpfad entfernt habe fängt dieser den Flugpfad umstandslos ein. Der Autopilot der Twin Otter führt mich sicher zur geplanten Flugroute zurück und auf dieser weiter. Bevor es mit der Twin Otter runter zur Landung geht, packt mich der Übermut und ich provoziere „schnell“ noch einen Stall. Laut Tabelle müsste bei eingefahrenen Klappen der Stall bei 64 KIAS eintreten. Langsam ziehe ich die Schubhebel auf Flight Idle zurück, halte dabei aber die Höhe. Bei 64 KIAS und einem Anstellwinkel von 22° leuchtet die Stall Lampe rot auf. Der Zeiger im Fahrtmesser flattert unruhig hin und her. Verursacht wird dies durch die turbulente Strömung, die am Pitotrohr entstanden ist und die den Messvorgang im Fahrtmesser empfindlich stört. Das ist keine angenehme Situation. Dennoch kippt im Stall die Twin Otter nicht einfach, über einem der Flügel, nach unten weg. Sondern sie senkt abrupt, über die Querachse, die Nase nach unten. Ansonsten aber verbleibt die Maschine in der horizontalen Lage. So lässt sich die Twin Otter, auch im Stall, recht gut unter Kontrolle halten. Dieses Verhalten erscheint plausibel, aufgrund ihres aerodynamischen Designs.
te ich den Autopiloten ein und aktiviere die Modis Steuerkurs und Höhe halten. Nach weiteren 3 Minuten schalte ich das GPS auf und lasse den Autopiloten im Modus NAV die Flugroute abfliegen. Obwohl ich mich ca. 12 Meilen nordwestlich vom Flugpfad entfernt habe fängt dieser den Flugpfad umstandslos ein. Der Autopilot der Twin Otter führt mich sicher zur geplanten Flugroute zurück und auf dieser weiter. Bevor es mit der Twin Otter runter zur Landung geht, packt mich der Übermut und ich provoziere „schnell“ noch einen Stall. Laut Tabelle müsste bei eingefahrenen Klappen der Stall bei 64 KIAS eintreten. Langsam ziehe ich die Schubhebel auf Flight Idle zurück, halte dabei aber die Höhe. Bei 64 KIAS und einem Anstellwinkel von 22° leuchtet die Stall Lampe rot auf. Der Zeiger im Fahrtmesser flattert unruhig hin und her. Verursacht wird dies durch die turbulente Strömung, die am Pitotrohr entstanden ist und die den Messvorgang im Fahrtmesser empfindlich stört. Das ist keine angenehme Situation. Dennoch kippt im Stall die Twin Otter nicht einfach, über einem der Flügel, nach unten weg. Sondern sie senkt abrupt, über die Querachse, die Nase nach unten. Ansonsten aber verbleibt die Maschine in der horizontalen Lage. So lässt sich die Twin Otter, auch im Stall, recht gut unter Kontrolle halten. Dieses Verhalten erscheint plausibel, aufgrund ihres aerodynamischen Designs.
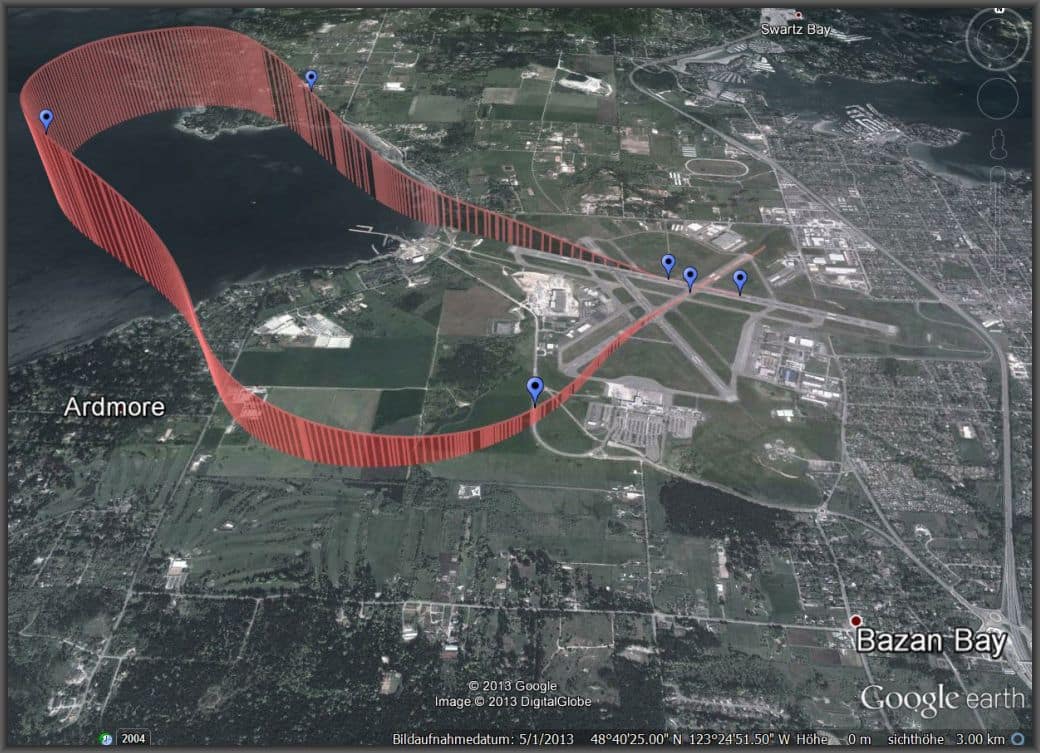 Nach so viel Auspropieren, zugegeben, mit etwas Angst- schweiß im Hemd, gehe ich zur STOL Landung über. Mit 67 Knoten Anfluggeschwindigkeit, die Flaps voll ausgefahren und einem Landegewicht von ca. 4,8 Tonnen, setze ich die Twin Otter auf die Ackerpiste von Hope auf. Sofort lege ich den Reverse Thrust ein. Das schont schließlich die Bremsbelege, die teuer sind. 130 Gallonen Treibstoff hat die Twin Otter für die Start- und Landeübungen, mehrmaligen Höhenwechsel und den 100 NM langen Flug von Victoria nach Hope verbraucht. 38 Minuten war ich in der Luft, dies bei wenig Rückenwind. Eine mit dem Flight Recorder aufgezeichnete Start- und Landeübung am Airport, lasse ich mir in Google Earth, zur Analyse(!), noch einmal anzeigen. Das sieht einerseits wirklich sehr schön, andererseits aber auch sehr unschön aus. Schön die Darstellung, unschön, wie ich geflogen bin. In den Queranflug zur Piste 03 bin ich viel zu früh eingekurvt. Und das rechtzeitige Eindrehen in den Endflug, auf die Piste 03, scheint mir offensichtlich auch misslungen zu sein. Dies würde der Fluglehrer bzw. der Prüfer so nicht durchgehen lassen. Dennoch, an den Flugeigenschaften der Twin Otter hat es ganz bestimmt nicht gelegen. Diese sind sehr realitätsnah von den Entwicklern abgebildet worden.
Nach so viel Auspropieren, zugegeben, mit etwas Angst- schweiß im Hemd, gehe ich zur STOL Landung über. Mit 67 Knoten Anfluggeschwindigkeit, die Flaps voll ausgefahren und einem Landegewicht von ca. 4,8 Tonnen, setze ich die Twin Otter auf die Ackerpiste von Hope auf. Sofort lege ich den Reverse Thrust ein. Das schont schließlich die Bremsbelege, die teuer sind. 130 Gallonen Treibstoff hat die Twin Otter für die Start- und Landeübungen, mehrmaligen Höhenwechsel und den 100 NM langen Flug von Victoria nach Hope verbraucht. 38 Minuten war ich in der Luft, dies bei wenig Rückenwind. Eine mit dem Flight Recorder aufgezeichnete Start- und Landeübung am Airport, lasse ich mir in Google Earth, zur Analyse(!), noch einmal anzeigen. Das sieht einerseits wirklich sehr schön, andererseits aber auch sehr unschön aus. Schön die Darstellung, unschön, wie ich geflogen bin. In den Queranflug zur Piste 03 bin ich viel zu früh eingekurvt. Und das rechtzeitige Eindrehen in den Endflug, auf die Piste 03, scheint mir offensichtlich auch misslungen zu sein. Dies würde der Fluglehrer bzw. der Prüfer so nicht durchgehen lassen. Dennoch, an den Flugeigenschaften der Twin Otter hat es ganz bestimmt nicht gelegen. Diese sind sehr realitätsnah von den Entwicklern abgebildet worden.
Fazit – eine vorläufige Bilanz
Um es kurz zu machen! Wer das Motorenmanagement nicht beherrscht, wird nicht allzu viel von der Simulation haben und sollte vielleicht doch besser die Finger von dem Add On lassen. Denn zu häufig wird einem die Maschine crashen, so dass die Simulation zwangsläufig beendet wird. Hier kann man nicht einfach losfliegen, nach draußen gucken, die virtuelle Landschaft im Simulator bewundern und nur darauf achten, dass man die Geschwindigkeit irgendwie über den finalen Strömungsabriss hält. Nein! Hier muss man ständig, wie ein Lux, den Drehmomentmesser und die Turbinentemperatur im Blick behalten, um nicht unversehens in einen unkontrollierten Flugzustand zu geraten, der die Twin Otter lieblos in den Acker haut.
 Für Ästheten der Luftfahrt ist die Twin Otter von Aerosoft einfach nur ein Genuss, den man ausgiebig genießen kann. Am visuellen Design, sowohl Außen als auch Innen gibt es überhaupt nichts zu beanstanden. Besser kann das Outfit nicht mehr abgebildet werden. Der Sound klingt realistisch. Das Operating Manual ist mir dagegen zu dürftig, insbesondere im Hinblick auf das komplexe Triebwerksmanagement. Für den unerfahrenen, aber wissbegierigen, Simmer liefert das Handbuch nur wenig an Erklärungen und Begründungen, warum diverse Betriebszustände bestimmte Operationen durch den Piloten erfordern. Es ist niemanden möglich, sich aus der Abarbeitung der Checklisten die Systemlogik einer komplexen Maschine zu erschließen. Im realen Leben wird dem Piloten ein Instruktor bzw. Fluglehrer zur Seite gestellt, der den zukünftigen Flugzeugführer in die „Geheimnisse der Systemlogik“ des jeweiligen Flugzeugmusters einweiht. Hilfreich wäre es zudem, wenn die Erläuterungen und das Betriebshandbuch der Twin Otter in Deutsch erscheinen. So muss der unbedarfte Simmer sich nicht erst alles mühsam selbst übersetzen, um die Systemlogik besser zu verstehen, die innerhalb der Twin Otter zum Tragen kommt. Abgesehen von diesen leicht zu behebenden Mängeln gibt es sonst nichts ernstes, was zu beanstanden wäre. Ich sehe zurzeit nichts, was besser programmiert werden könnte, außer dass die wenigen Dummies im Schaltpanel noch mit ihren Funktionen belegt werden könnten.
Für Ästheten der Luftfahrt ist die Twin Otter von Aerosoft einfach nur ein Genuss, den man ausgiebig genießen kann. Am visuellen Design, sowohl Außen als auch Innen gibt es überhaupt nichts zu beanstanden. Besser kann das Outfit nicht mehr abgebildet werden. Der Sound klingt realistisch. Das Operating Manual ist mir dagegen zu dürftig, insbesondere im Hinblick auf das komplexe Triebwerksmanagement. Für den unerfahrenen, aber wissbegierigen, Simmer liefert das Handbuch nur wenig an Erklärungen und Begründungen, warum diverse Betriebszustände bestimmte Operationen durch den Piloten erfordern. Es ist niemanden möglich, sich aus der Abarbeitung der Checklisten die Systemlogik einer komplexen Maschine zu erschließen. Im realen Leben wird dem Piloten ein Instruktor bzw. Fluglehrer zur Seite gestellt, der den zukünftigen Flugzeugführer in die „Geheimnisse der Systemlogik“ des jeweiligen Flugzeugmusters einweiht. Hilfreich wäre es zudem, wenn die Erläuterungen und das Betriebshandbuch der Twin Otter in Deutsch erscheinen. So muss der unbedarfte Simmer sich nicht erst alles mühsam selbst übersetzen, um die Systemlogik besser zu verstehen, die innerhalb der Twin Otter zum Tragen kommt. Abgesehen von diesen leicht zu behebenden Mängeln gibt es sonst nichts ernstes, was zu beanstanden wäre. Ich sehe zurzeit nichts, was besser programmiert werden könnte, außer dass die wenigen Dummies im Schaltpanel noch mit ihren Funktionen belegt werden könnten.
Die Simulation des Motorenmanagements kann man schon als eine Lehrstunde in die Einführung der Triebwerkstechnologie einer Turboprop Maschine ansehen. Für Simmer, die ihren fachkundigen Wissenshorizont erweitern wollen, gibt es hier viel zu experimentieren und zu lernen. Die Begeisterung für dieses Add On wird sicherlich lange anhalten. Das kann ich hier auf jeden Fall versprechen. Eine ganz klare Kaufempfehlung schon jetzt von mir, auch wenn immer noch einige Modelle fehlen. Für den Preis von ca. 30 Euro bekommt man ein hervorragendes Simulationsprogramm an die Hand, das jeden Simmer erfreuen wird, der nach Spaß und gelehrsamer Unterhaltung sucht. Die Twin Otter hat schon jetzt das Potential, in der Kategorie der Turboprops DAS Add-On des Jahres 2013 zu werden.
Zusammenfassung
PRO | CONTRA |
|
|
INFORMATION | TESTSYSTEM |
Günter Brinkhoff
|





Tolle Rezension … herzlichen Dank!
Und wieder ein schönes Modell mehr auf meiner Wunschliste: das wird ein teures – aber sehr inhaltvolles – Jahr 2013 in meiner Flusi-Karriere 🙂
SG
Michael (Nähe EDNX)
Bremsbeläge…
Ansonsten schöner Test, danke!
Klasse Review, Dankeschön!
Da traut man sich ja gar nicht real mit dem Ding zu fliegen, so oft wie die in Brand gerät. 😉
Wow, super Rezension. Dem Kritikpunkt, dass in der Dokumentation viel zu wenig bzgl. Triebwerksmanagement erklärt ist, kann ich voll beipflichten. Umso schöner, dass das ausführlich in diesr Rezension erklärt wurde. Mir ist jetzt einiges klarer geworden (z.B. warum ich den Fuellever nicht zu früh öffnen darf…). Vielen Dank dafür.
Hat vielleicht jemand noch weitere Links/Literaturempfehlungen bzgl. Handling von Turboporps?
Kann mich nur anschließen – wirklich ganz tolles Review. Besonders gefällt mir die fachkundige Schilderung der Systeme, vor allem der Turboprop Engine.
Vielen Dank
Ja da ist er wieder, der Schatten der so gute Entwicklungen nachhaltig trübt. Auf der einen Seite findet man eine wirklich gute Darstellung, außen wie auch innen. Andererseits fehlt es an grundlegenden Überlegungen, wenn es um die Arbeit der Piloten an sich geht. Was nützt mir mein Rechner mit über 4,4 GHz, wenn die Entwickler vorsätzlich die Sichtqualität nach außen und auf die Instrumente reduzieren?! Auch möchte ich so manchen Flugzeuglenkermeister über die Schulter zusehen wie er einen DME-ARC zaubert, oder den künstlichen Horizont Millimeter genau ablesen muss.
6 von 7 Kommentaren positiv, und das bei Aerosoft 😀 Da scheinen sie es ja diesmal recht gut hinbekommen zu haben in den Augen der geneigten HC-Simmer-Gemeinde. Schönes Review; ich hoffe das trifft auch alles so zu was da steht, sonst werde ich 30 Euro in den Wind geschossen haben (was allerdings nicht das erste Mal gewesen wäre).
Jetzt kann ich ja endlich mal meine PNG-Szenerie abfliegen, die seit 2 Jahren ungenutzt vor sich hin schlummert, von halb Alaska ganz zu schweigen…
Eine Frage noch: Die erste Ausführung hat mir das Schwimmern mit argen Probleme beim Steuern auf dem Wasser verleidet. Mag ja sein dass das Original kein Wasserruder hat, aber mit einseitigem Schub ging es halt auch kaum. Hat sich das gebessert?
Boris